
Series Elastic Actuator - SEA
Each degree of freedom in the Biped is controlled by a series elastic actuator (SEA). One of these is being tested at Bucknell University to better understand characteristics such as fiction and obtain an accurate model that will ultimately improve the control of the Biped.
Work was started on the SEA by Matt Kandler during the 2008-2009 academic year at Bucknell University under the supervision of Professor Keith Buffinton. The majority of this work was spent setting up the SEA for testing and creating a user manual for to aid future student work on the SEA. Some preliminary testing was performed on the SEA to test static and dynamic friction in the system.
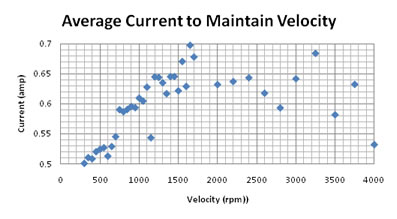
Figure 1. Summary of data from initial dynamic friction testing
During the summer of 2009 work on the SEA was picked up by Jason Geist and Billy Rittase. Jason designed and manufactured an apparatus to hold the SEA during testing (see image below).
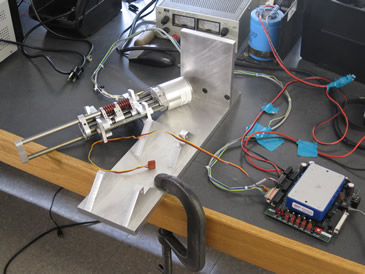
Figure 2. Components of current testing apparatus