Design Details -
IHMC First Iteration (summer '09)
Bucknell First Iteration (summer '09)
Bucknell Second Iteration (senior design '10)
Robotic Vision Platform - Bucknell 2nd Iteration
The second, and current, iteration of the head design at Bucknell is being performed by a team led by Professor Steven Shooter as a year-long senior design project. This group is composed of seniors: Scott Bevan, Matthew Kandler, Danielle Renzi, and William Rittase with assistance from Jason Geist on mechanical components and Jeff Gum on electrical components and interfacing.
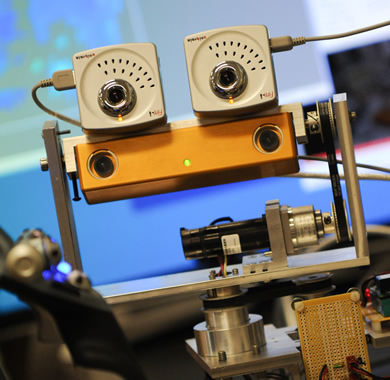
The intention behind this version is to address the inadequecies of the previous two iterations and offer a robust design that may be more feasible for use on the Biped system.
See the full report here.