Design Details -
IHMC First Iteration (summer '09)
Bucknell First Iteration (summer '09)
Bucknell Second Iteration (senior design '10)
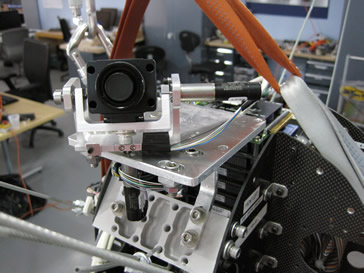
Robotic Vision Platform - IHMC Head
This early iteration of the robot head was designed by Matthew Kandler '10 and Daniel Snyder '10 during the summer of 2009 while working at the robotics lab at The Florida Institute for Human and Machine Cognition (IHMC).
The intention of this design was to simplify the problem as much as possible and test to see what capabilities and specifications would be required for future iterations. Therefore, this head was designed to move only a single Firefly MV camera in pan and tilt directions.
See the full report here.